

 diff方法的运行规则和前提方法
diff方法的运行规则和前提方法为了了解diff方法的运行规则和前提方法,首先我们通过几个图快速区别虚拟node进行深度优先和同级对比。
深度优先:
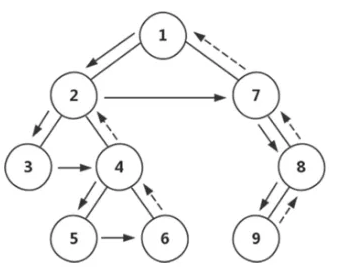
同级对比:
如上面图所示,每次vnode都是执行同级对比。(对应dom同一个父元素)
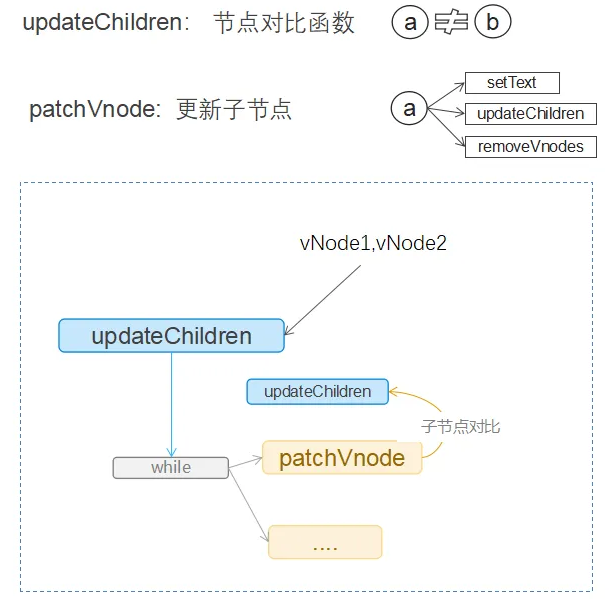
代码逻辑如下图:
第二,简单判断:sameVnode函数用来进行判断是否是同一个vnode元素。源代码如下:

如图所示:
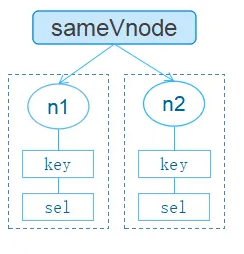
这里有两个重要元素:key : 开发者定义的”:key”;sel : 元素tagName+元素id+元素class。
sel的定义源码如下:

vNode构建函数:
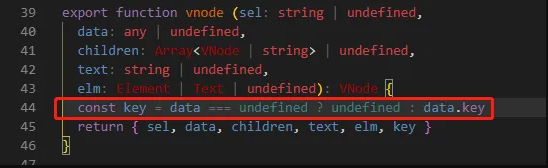
第三是构建索引。
逻辑如图:
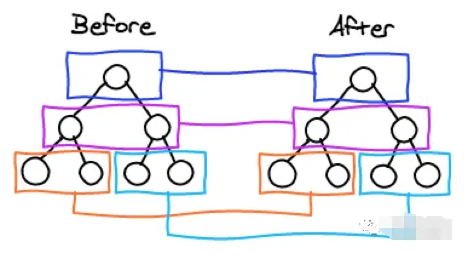
 如何处理元素
如何处理元素
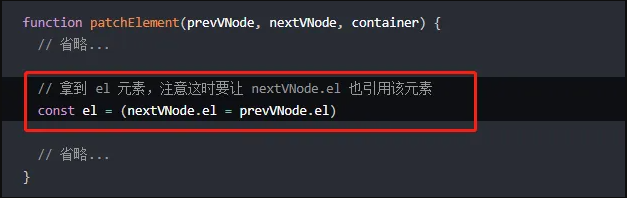
尽量不新增/删除dom。如图下所示:
如果是相同vnode,源码如下:
 开始比较
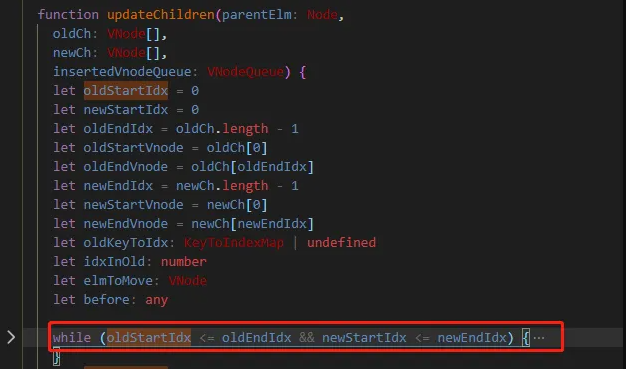
开始比较首先会进行时间复杂度O(n)的while循环,循环条件为“遍历旧节点数组&&遍历新节点数组,谁先遍历完循环就结束”。源码如下图:
在每次的循环过程中,会有两大类判断方法:
1)首尾比较&首尾序号
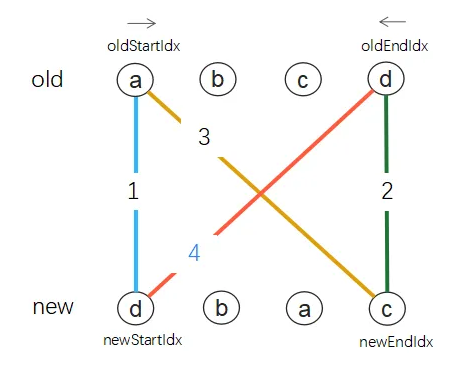
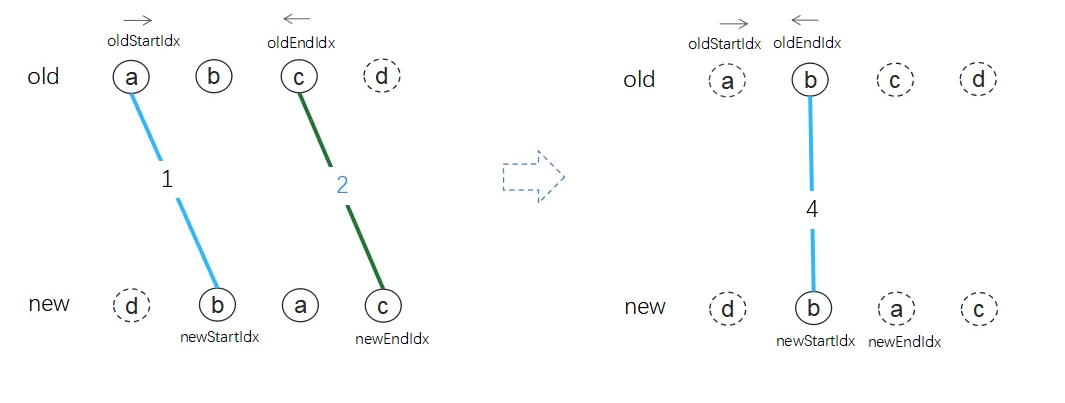
逻辑:如图上所示。首先在循环遍历前标记好新,旧节点数组的开始位置和结束位置的序号:oldStartIdx、oldEndIdx、newStartIdx、newEndIdx;其次在循环遍历的过程中采用“首首比较,尾尾比较,首尾比较”。
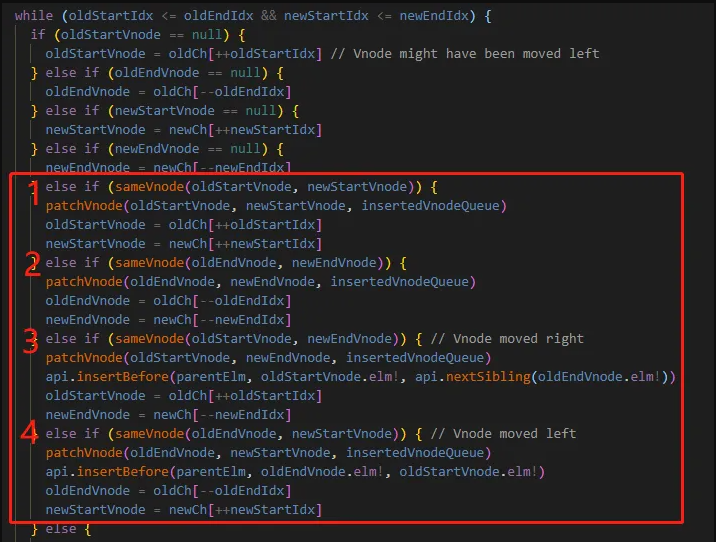
源码如下:
如果数据为图上所示,那么根据首尾比较方法会有如下图所示结果,最终全部执行了更新操作:
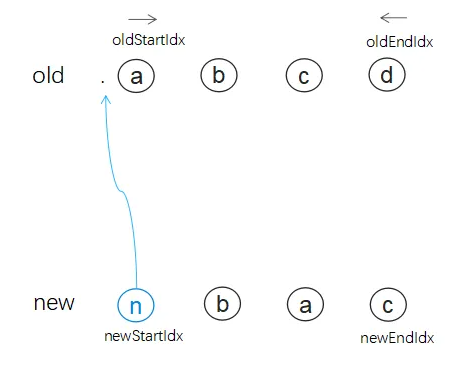
2)索引比较
最坏情况,这里的时间复杂度也是O(n),即整个算法复杂度O(n)+O(n)。每次遍历的过程中可能存在”新数组节点新增/旧数组节点删除”,那么前后对比就满足不了条件。这里逻辑会进入索引比较:比如这种情况:
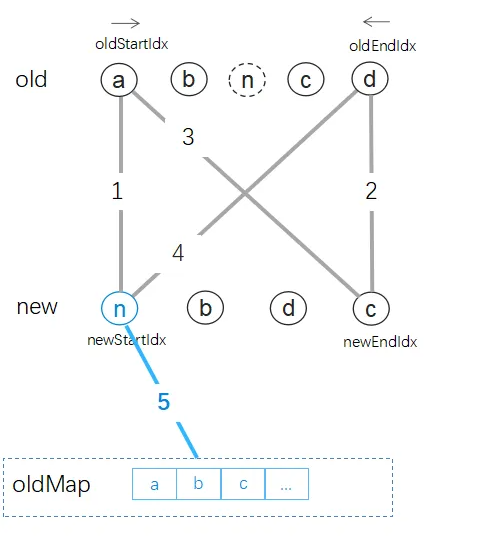
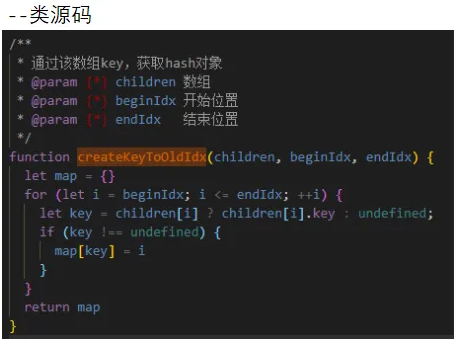
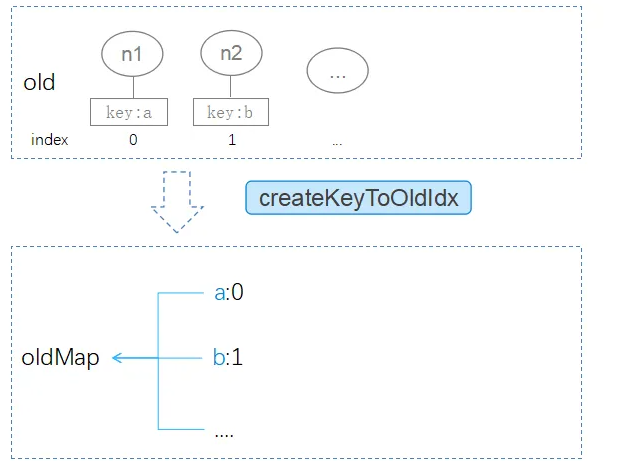
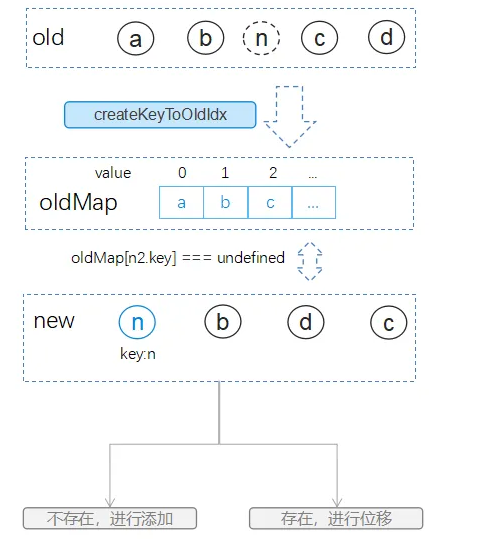
那么循环中会执行一遍,创建旧数组的索引对象。从创建到比较的整个逻辑图如下:
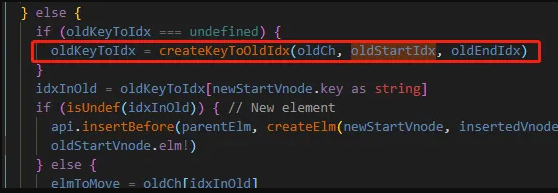
这里的源码如下:
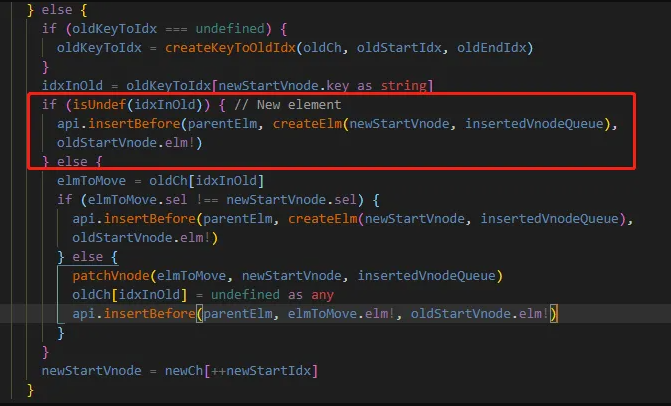
-
当旧节点不存在新增的节点时,进行当前oldStartIdx位置的添加
源码如下:
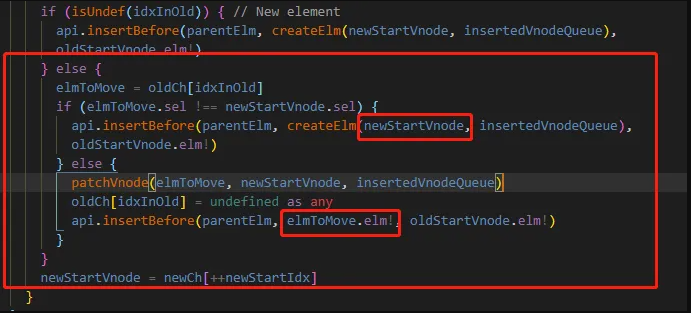
-
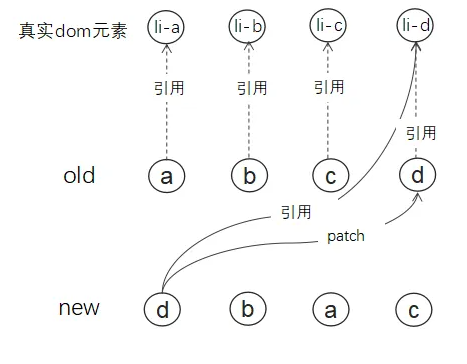
当旧数组存在节点,那么进行位置移动
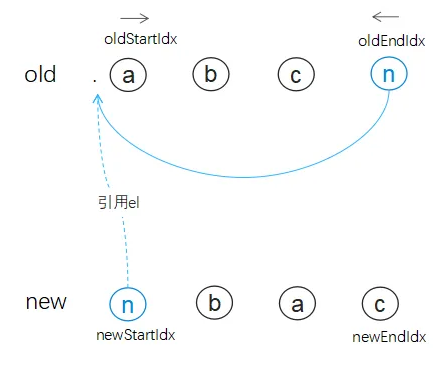
源码:
3)当节点遍历完之后
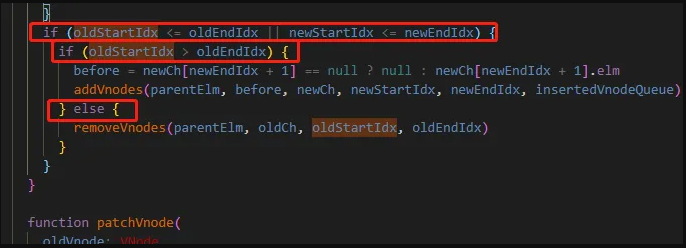
会存在两种情况:新数组已经遍历完,但旧数组没有遍历完成;旧数组遍历完成,但新数组没有遍历完成。故源代码的判断如下:
-
旧数组没有循环完成
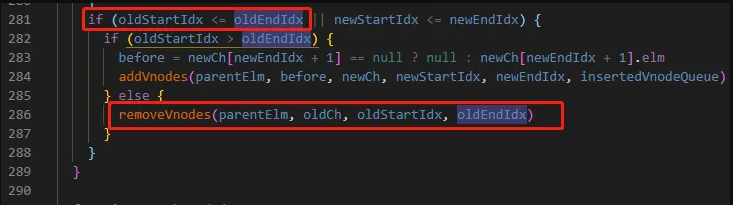
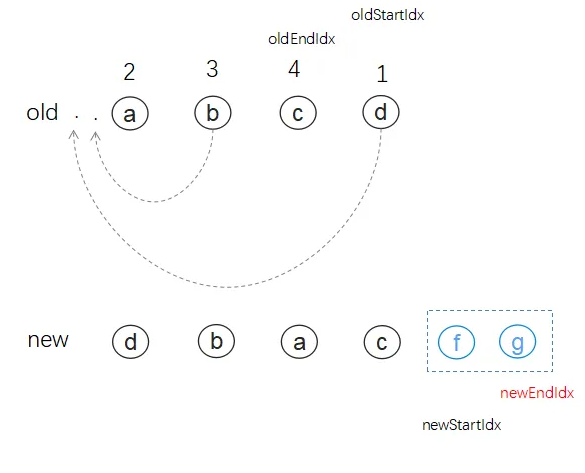
旧数组没有循环完成的效果如下图所示:

这里注意一个点,我们每次的节点更新会移动序号,即使被删除的节点不在一块最终也会被首尾比较算法“摞在一块”(oldStartIdx~oldEndIdx)。上图所示更加明显。源码在这里就进行批量删除:
-
新数组没有循环完成
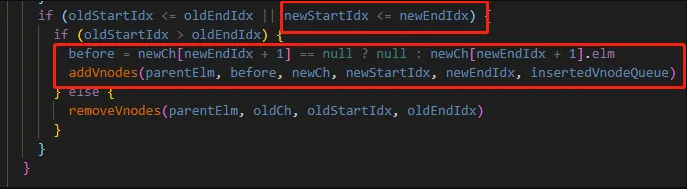
效果如下图所示:
整体来说,有几个关键点:简单对比;创建旧数组的索引表;首位对比&首尾索引&vnode位置移动;索引添加/位移;剩余部分批量处理添加/删除。
经过前后对比&索引的过滤后,只会存在新.末尾节点!==旧节点及之前的连续的新节点(!==旧节点),所以这里也被“摞在一块”,即 (newStartIdx~newEndIdx)。源码如下。这样,整个diff的对比算法就已经走完了。核心就是:前后对比+索引。

vue3.0对于diff比较前的优化
vue3.0针对“无脑”patchVnode进行了过滤–静态类型Vnode老版的源码:

这里,我们再重复下vue2.x系列的对比更新逻辑:

新版的vue3.0增加了静态类型Vnode。如果是静态类型的vnode,直接跳过更新,修改新节点引用即可。
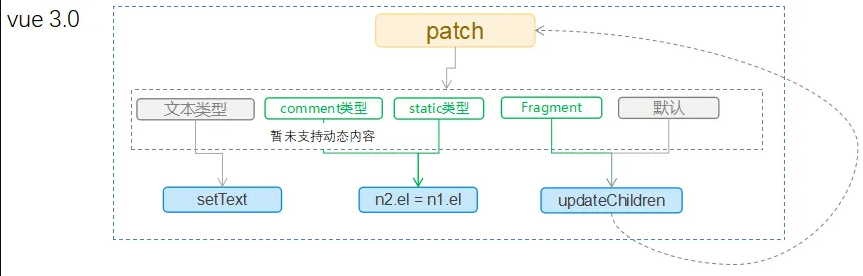
comment类型目前翻到它的源码也只是更改引用,源码作者加上了一行注释。

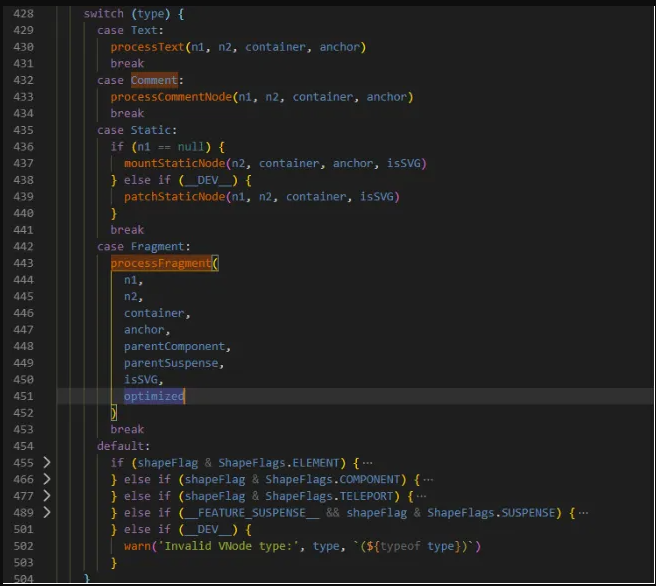
补充一下,flagment碎片类型为新增的vnode类型,即:

vue3.0的过滤判断源码如下:

数组比较的应用
由于我们想监听数组的变化,参考了diff算法覆写类似的逻辑,用来在update,add,dels时,代码层面获取操作的具体节点明细(新旧节点的位置,内容)。希望本文对你有帮助。
本文转载自 陈碧松 腾讯云开发者,原文链接:https://mp.weixin.qq.com/s/-8-AkMqwXJX54r6Lzbr5rA。